High-altitude wind power
High-altitude wind power (HAWP) has been imagined as a source of useful energy since 1833 with John Etzler's vision[1] of capturing the power of winds high in the sky by use of tether and cable technology. An atlas of the high-altitude wind power resource has been prepared for all points on earth.[2]
Various mechanisms are proposed for capturing the kinetic energy of winds such as kites, kytoons, aerostats, gliders, gliders with turbines for regenerative soaring,[3] sailplanes with turbines, or other airfoils, including multiple-point building- or terrain-enabled holdings.[4] Once the mechanical energy is derived from the wind's kinetic energy, then many options are available for using that mechanical energy: direct traction,[5][6] conversion to electricity aloft or at ground station, conversion to laser or microwave for power beaming to other aircraft or ground receivers. Energy generated by a high-altitude system may be used aloft or sent to the ground surface by conducting cables, mechanical force through a tether, rotation of endless line loop, movement of changed chemicals, flow of high-pressure gases, flow of low-pressure gases, or laser or microwave power beams.
High-altitude wind for power purposes
Winds at higher altitudes become steadier, more persistent, and of higher velocity. Because power available in wind increases as the cube of velocity (the velocity-cubed law),[7][8] assuming other parameters remaining the same, doubling a wind's velocity gives 2x2x2=8 times the power; tripling the velocity gives 3x3x3=27 times the available power. With steadier and more predictable winds, high-altitude wind has an advantage over wind near the ground. Being able to locate HAWP to effective altitudes and using the vertical dimension of airspace for wind farming brings further advantage using high-altitude winds for generating energy.
High-altitude wind generators can be adjusted in height and position to maximize energy return, which is impractical with fixed tower-mounted wind generators.
In each range of altitudes there are altitude-specific concerns being addressed by researchers and developers. As altitude increases, tethers increase in length, the temperature of the air changes, and vulnerability to atmospheric lightning changes. With increasing altitude, exposure to liabilities increase, costs increase, turbulence exposure changes, likelihood of having the system fly in more than one directional strata of winds increases, and the costs of operation changes. HAWP systems that are flown must climb through all intermediate altitudes up to final working altitudes—being at first a low- and then a high- altitude device.
Methods of capturing kinetic energy of high-altitude winds
Energy can be captured from the wind by kites, kytoons, tethered gliders,[9] tethered sailplanes, aerostats (spherical as well as shaped kytoons), bladed turbines, airfoils, airfoil matrices, balloons, parachutes, drogues, variable drogues, spiral airfoils, Darrieus turbines, Magnus-effect VAWT blimps, multiple-rotor complexes, fabric Jalbert-parafoil kites, uni-blade turbines, flipwings, tethers, bridles, string loops, wafting blades, undulating forms, piezoelectric materials,[10] and more.[11][12]
When a scheme's purpose is to propel ships and boats,[13][14] the objects tether-placed in the wind will tend to have most of the captured energy be in useful tension in the main tether. The aloft working bodies will be operated to maintain useful tension even while the ship is moving. This is the method for powerkiting sports. This sector of HAWP is the most installed method. The folklore is that Benjamin Franklin used the traction method of HAWP. George Pocock was a leader in tugging vehicles by traction.[15]
Controls
HAWP aircraft need to be controlled. Solutions in built systems have control mechanisms variously situated. Some systems are passive, or active, or a mix. When a kite steering unit (KSU) is lofted, the KSU may be robotic and self-contained; a KSU may be operated from the ground via radio-control by a live human operator or by smart computer programs. Some systems have built sensors in the aircraft body that report parameters like position, relative position to other parts. Kite control units (KCU) have involved more than steering; tether reeling speeds and directions can be adjusted in response to tether tensions and needs of the system during a power-generating phase or return-non-power-generating phase. Kite control parts vary widely.[16][17]
Methods of converting mechanical energy to other forms of energy
The mechanical energy of the device may be converted to heat, sound, electricity, light, tension, pushes, pulls, laser, microwave, chemical changes, or compression of gases. Traction is a big direct use of the mechanical energy as in tugging cargo ships and kiteboarders. The methods of getting the mechanical energy from the wind's kinetic energy are several. Lighter-than-air (LTA) moored aerostats are employed as lifters of turbines. Heavier-than-air (HTA) tethered airfoils are being used as lifters or turbines themselves. Combinations of LTA and HTA devices in one system are being built and flown to capture HAWP. Even a family of free-flight airborne devices are represented in the literature that capture the kinetic energy of high-altitude winds (beginning with a description in 1967 by Richard Miller in book Without Visible Means of Support) and a contemporary patent application by Dale C. Kramer, soaring sailplane competitor, inventor.
Electric generator position in a HAWP system
Electricity generation is just one of the optional choices of using captured mechanical energy; however, this option dominates the focus of professionals aiming to supply large amounts of energy to commerce and utilities. A long array of secondary options include tugging water turbines, pumping of water, or compressing air or hydrogen. The position of the electric generator is a distinguishing feature among systems. Flying the generator aloft is done in a variety of ways. Keeping the generator at the mooring region is another large design option. The option in one system of a generator aloft and at the ground station has been used where a small generator operates electronic devices aloft while the ground generator is the big worker to make electricity for significant loads.
Aerostat-based HAWP
One method of keeping working HAWP systems aloft is to use buoyant aerostats whether or not the electric generator is lifted or left on the ground. The aerostats are usually, but not always, shaped to achieve a kiting lifting effect. Recharging leaked lifting gas receives various solutions.
- W. R. Benoit US Patent 4350897 Lighter than air wind energy conversion system by William R. Benoit, filed Oct 24,1980, and issued: Sep 21, 1982.
- The TWIND system is based on the use of a sail surface elevated by the climbing force of an aerostatic balloon connected to the ground by a cable used also for energy transmission. The wind present at high altitudes creates a horizontal push on the sail which in its movement transmits this energy to the ground via the connecting cable. At the end of its movement forward, the sail surface is reduced allowing it to move upwind with reduced energy waste.[18]
- The Magenn aerostat is a vertical-axis wind turbine held with its axis horizontal by bridling the axis traverse to the wind so that Magnus-effect lift obtains during autorotation; the electricity is generated with end-hub generators.[19]
- The LTA Windpower PowerShip uses lift from both an aerostat and wings. It operates close to neutral buoyancy and doesn't require a winch. Power is generated by turbines with the propellers on the trailing edge of the wings. The system is designed to be able to take off and land unattended.[20]
- Airbine proposes to lift wind turbines into the air by use of aerostats; the electricity would return to ground loads by way of conductive tether.[21]
- Airship power turbine by William J. Mouton, Jr., and David F. Thompson: Their system integrated the turbine within the central portion of a near-toroidal aerostat, like putting a turbine in the hole of an aerostat donut.[22]
Non-airborne HAWP
Conceptually, two adjacent mountains (natural or terrain-enabled) or artificial buildings or towers (urban or artificial) could have a wind turbine suspended between them by use of cables. When HAWP is cabled between two mountain tops across a valley,[4] the HAWP device is not airborne, but borne up by the cable system. No such systems are known to be in use, though patents teach these methods. When non-cabled bridges are the foundation for holding wind turbines high above the ground,[23] then these are grouped with conventional towered turbines and are outside the intent of HAWP where the tethering an airborne system is foundational.
HAWP Safety
Lightning, aircraft traffic, emergency procedures, system inspections, visibility marking of system parts and its tethers, electrical safety, runaway-wing procedures, over-powering controls, appropriate mooring, and more form the safety environment for HAWP systems.
Challenges of HAWP as an emerging industry
There have been several periods of high interest in HAWP before the contemporary activity. The first period had a high focus on pulling carriages over the lands [24] and capturing atmospheric electricity and lightning for human use. The second period was in the 1970s and 1980s when research and investment flourished; a drop in oil price resulted in no significant installations of HAWP. Return on investment (ROI) has been the key parameter; that ROI remains in focus in the current development activity while in the background is the renewable and sustainable energy movement supporting wind power of any kind; but HAWP must compete on ROI with conventional towered solutions.
HAWP patents
Patents for kite and kytoon systems that work with energy obtained from upper winds are one of the significant tools being employed to advance the nascent HAWP industry.
Timeline for HAWP
Early centuries of kiting demonstrated that the kite is a rotary engine that rotates its tether part about its mooring point and causes hands and arms to move because of the energy captured from higher winds into the mechanical device. The tension in the lofted devices performs the work of lifting and pulling body parts and things. Airborne wind energy (AWE) for HAWP was birthed th[25] ousands of years ago; naming what happened and developing the implied potentials of tethered aircraft for doing special works is what is occurring in AWE HAWP. What is "low" for some workers is "high" for others.
- 1827 George Pocock's book ‘The Aeropleustic Art’ or 'Navigation in the Air by the Use of Kites or Buoyant Sails' was published. The book was to be republished again several times. The Charvolant or Kite Carriage was described. Importantly Pocock described use of kites for land and sea travel.[26]
- 1833 John Adolphus Etzler saw HAWP blossoming at least for traction.[27]
- 1864? Book's chapter Kite-Ship well describes key dynamics of HAWP used for tugging ships by kites. John Gay's: or Work for Boys. Chapter XVIII in the Summer volume.[14]
- 1943 Stanley Biszak instructed using potential energy in free-flight for converting ambient winds impacting turbine to drive electric generator to charge batteries.[28]
- 1967 Richard Miller, former editor of Soaring magazine, published book Without Visible Means of Support that describes the feasibility of free-flight coupled non-ground-moored kites to capture differences in wind strata to travel across continents; such HAWP is the subject of Dale C. Kramer's contemporary patent application.
- 1973? Hermann Oberth In the appendix of his book Primer for Those Who Would Govern there are sketches and a photograph of a model of the Kite Power Station from the Oberth Museum.[29]
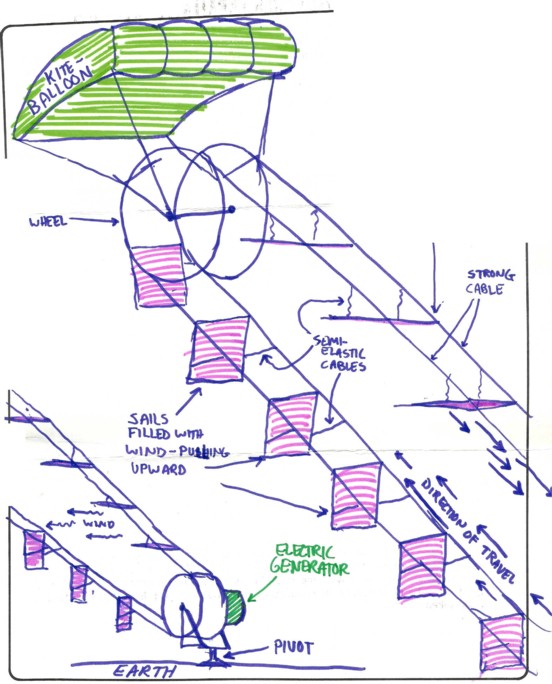
- 1977 April 3, 1977, invention declared. On September 21, 1979, Douglas Selsam notarized his kite-lifted endless chain of airfoils HAWP system, generic type that would later show in Dutch astronaut Wubbo Ockels' [30] device called LadderMill described in a patent of 1997. Douglas Selsam conceived his Auto-oriented Wind Harnessing Buoyant Aerial Tramway on April 3, 1977. On the Selsam notarized disclosure of invention was placed a date of Sept. 20, while the notary placed the final signing on Sept. 21, 1979. notes and drawings.[31]
- 1979 Professor Bryan Roberts begins giromill gyrocopter-type HAWP wind generator development.[32]
- 1986 Bryan Roberts' AWE HAWP rotor generates electricity and lifts itself in tethered flight.[33]
- 1992 Free Rotor WO/1992020917 Free Rotor by JACK, Colin, Humphry, Bruce (one man). Colin Jack. Colin Bruce. Multi-rotors are treated. Faired tethers are recognized. 1992.
- 2002 Drachen Foundation awarded a grant to David Lang so that he would explore the use of kites to generate practical power.[35]
- 2004 Physicist Alexander Bolonkin presented a strong analysis toward groundgen AWECS.[36]
- 2004 Drachen Foundation had David Lang, former NASA expert, aerospace consultant, conduct a survey-study of kite-based power generation. He published a summary of methods in his view.[37]
- 2005 HAWP conference held at AeroVironment, Pasadena, CA; attendees: Paul MacCready, Dave Lang, Joe Hadzicki, Scott Skinner. The long meeting was videotaped; the tape is in the archives of the Drachen Foundation, open to researchers.
- 2006 on October 19: Jong Chul Kim, filed for international patent protection for "Electric power generation system using hydro turbine tracted by paraglider." His further studies has been for at-sea production of hydrogen and other chemicals using HAWP tethering kite systems.[38]
- 2006 September: [1] A 40 kW prototype of high-altitude wind genereator is tested in Italy by Kite Gen Research Massimo Ippolito.
- 2007 Dave Santos demonstrated lofted Portland KiteMotor at alt-energy West Coast Climate Convergence; the generation success was announced in HIPFiSH Columbia-Pacific's Alternative Monthly (Aug.-Sept./2007). KiteMotor Growing Pains
- 2008 Dave Santos demonstrates flipwings for AWE passive-control generator systems.
- 2009 January 28, University of Texas hosted Airborne Wind Energy Seminar in its Aerospace Engineering Department. Keynote presenter: Dave Santos of KiteLab.[39]
- 2009 Dave Santos demonstrated passive control of kite-lifted working dynamic kite operating a string tripod to transfer kite-gained mechanical energy to a ground-based generator via pulley and crank; this was not a reel-method scheme.
- 2009 Towered WECS companies open departments for AWE HAWP: Two ground-hugging towered wind-turbine companies open AWE HAWP departments: SpiralAirfoil Airborne and Selsam.
- 2009 A first international industry association was founded: Airborne Wind Energy Industry Association [40]
- 2009 August. Dr. Hong Zhang, Kyle Fitzpatrick, and other students demonstrate working generation of electricity from powerkiting in preparation for further academic HAWP studies at Rowan University, New Jersey.[41]
- 2009 Nov. 5-6 : HAWP conferece in Chico, CA and Oroville, CA. Scores of HAWP and AWE companies and inventors attended. Systems demonstrated: KiteLab's lifted bladed turbine with generator aloft, Selsam multi-rotor torque-tube hybrid with groundstationed generator, SkyMill Energy autogiro RC-controlled reel-in-out method.[42]
- 2009 Dec. 9 : TU Delft University holds Kite Dynamics Symposium 09 for HAWP as central focus.[43][44][45]
- 2010 January 13. An announcement that a large investment will be made to construct a commercial utility-scale HAWP project in the city of Foshan, China.[46]
- 2010 March 1–3: Three HAWP companies had booths at ARPA-E Technology Showcase, Gaylord Convention Center, Washington, DC. Investment and showcasing by HAWP entities: Joby Energy, Sky Windpower, and Makani Power directed visitors to each other's booths.
- 2010 March 6. Eight airborne wind energy technology entity leaders in USA held a telephone conference and decided without objection to propose a modification to bill HR 3165;[47] the primary line-item proposed modification entered to a congressional member was the inclusion of "airborne wind energy technology."
- 2010 April 24. Multiple chaotic systems effectively captured for useful work: Full demonstration of working mini-AWECS involving Double Pendulum and flapping kite wing-mill under lifter kite to drive clockworks system's charging lithium battery by KiteLab of Ilwaco, Washington, USA. Designer and builder: Dave Santos.[48]
- 2010, June 16 An international partnership between Dutch and Norwegian entities provides second-round financing for classic reel-in HAWP method using tethered powerplane system. Airborne wind energy technology firm Ampyx Power partners with Byte and Statkraft.[51]
- 2010 October: The Wayne German Prize for Contributions to Airborne Wind Energy stated its second year awardee.[53]
- 2010 November 25: CONOPS are being drafted by KiteLab, Ilwaco, WA, USA, and also NASA AWT project leader for submission to the USA's FAA toward obtaining response for potentially having airborne wind energy conversion systems as an integral part of aviation and air space.[54]
- 2011 January 15: The 10th Annual Windless Kite Festival in Long Beach, WA (USA): Dave Santos successfully demonstated keeping a kite flying circling in no wind via use of tri-tether rig. Such proves a method for AWECS station-keeping when wind fails to keep the HAWP craft flying. The arrangement is a reverse of what Santos priorly demonstrated where kites can drive ground generator through a tri-tether rig.
- 2011 August 25: The 1st report on the high-altitude wind energy technologies and markets is published by GL Garrad Hassan. It is the first of it's kind and purely focuses on high-altitude wind energy systems. The Market Status Report on High Altitude Wind Energy provides a detailed overview on wind energy resources, different systems and technologies, involved companies and the market potential. The market part focuses on the offshore application of high-altitude wind energy.[55]
See also
References
- ^ The paradise within the reach of all men, without labor, by ..., Volumes 1-2 By John Adolphus Etzler
- ^ Global Assessment of High-Altitude Wind Power
- ^ Flight Without Fuel - Regenerative Soaring Feasibility Study
- ^ a b Wind Turbines on Mounts
- ^ SkySails
- ^ Anne Quéméré, the Oceankite and Extreme Weather
- ^ Wind Power Curves
- ^ The Power of the Wind: Cube of Wind Speed by the Danish Wind Industry Association
- ^ Makani Power, Inc. reported that they have progress on a tethered circling turbine glider-like craft that is powered at times and unpowered at times during energy generation. Report was at HAWP 2009 conference at Cleanteach Innovation Center in November 2009.
- ^ Piezoelectric materials
- ^ KiteLab
- ^ Joby Energy
- ^ KiteShip - Innovation in Tethered Flight
- ^ a b John Gay's Work for Boys. Four volumes. The summer volume had Chapter XVIII titled Kite-Ship that well described HAWP kite-tugging dynamics.
- ^ Mechanics of classical kite buggying or how Mr. Pocock gained 9 m/s by his Charvolant
- ^ SwissKitePower; designer of KCU was Corey Houle.
- ^ KiteGen project control as key technology for a quantum leap in wind energy generators by M. Canale, L. Fagiano, M. Milanese, and M. Ippolito.
- ^ TWIND
- ^ Magenn Power, Inc.
- ^ LTA Windpower
- ^ Funneled-Wind Turbine Aircraft Application for patent Patent application: Pub. No.: US 2008/0290665 A1, Publication date:November 27, 2008. Inventor: Lynn Potter of Barstow, California (US).
- ^ Airship power turbine, US Patent 4166596 by William J. Mouton, Jr., and David F. Thompson, filed April 28, 1978.
- ^ Bahrain World Trade Center examples a completed bridge holding wind turbines high above the ground; as the turbines are not tethered into the wind, this examples a twin-tower non-tethered non-airborne arrangement.
- ^ Pocock’s ‘The Aeropleustic Art’
- ^ http://energykitesystems.net/NewsReleases/20100609Ampyx_financing.pdf Energy Startup Ampyx Power secures further financing.
- ^ The Aeropleustic Art
- ^ The paradise within the reach of all men, without labor. Volumes 1-2 By John Adolphus Etzler. “We might extend the application of [wind] power to the heights of the clouds, by means of kites.”
- ^ US Patent 2368630 filed June 3, 1943.
- ^ http://www.meaus.com/articles/futureTasks.html
- ^ Tapping High Altitude Wind, 'Ladder' of Kites Viewed as Energy Source
- ^ Selsam Innovations
- ^ BBC News, SciTech.
- ^ Robert's Rotorcraft photograph of experiment in Australia. PJ Shepard places year at 1986 at best memory. Bryan Roberts recalls the photograph was at his session in May 1986. In the photograph the powered craft was almost in autorotation; actual electricity generation was done briefly in another test. A video is available where electric generation was effected. The shown craft had two rotating hubs; at each hub radiated a lifting rotor blade and a shorter streamlined blade with a counter-balancing mass at its tip Professor plans flying power station; total craft weighed 64 lb. From left to right the people: Hasso Nibbe, Alan Fien, Grahame Levitt, and Bryan Roberts; all were employees of the University of Sydney. Site: Mt. Pleasant Farm at Marulan in New South Wales. Wind: approximately 15 knots. AWECS inventor David H. Shepard after much correspondence finally met face-to-face in 2006 Professor Bryan Roberts; such are part of the foundations of HAWPA company Sky WindPower.
- ^ SkySails History and Milestones.
- ^ Discourse, Aug. 2008, page 30.
- ^ Utilization of Wind Energy at High Altitude
- ^ Using Kites to Generate Electricity: Plodding, Low Tech Approach Wins
- ^ Jong Chul Kim
- ^ Outline of presentation at University of Texas in Aerospace Engineering Department on January 28, 2009.
- ^ Airborne Wind Energy Industry Association
- ^ Rowan Engineering takes off with energy project
- ^ High Altitude Wind Power conference
- ^ Kite Dynamics Symposium 09
- ^ Complete announcement with introduction of speakers.
- ^ Presentation by Dr. Roland Schmehl at the symposium.
- ^ China’s first high-altitude wind power project settled in Foshan City of S. China's Guangdong Province
- ^ Wind Energy Research and Development Act of 2009
- ^ FairIP
- ^ Airborne Wind Energy Consortium
- ^ TechnologyGateway http://technologygateway.nasa.gov/index.cfm?fuseaction=media
- ^ Energy Startup Ampyx Power secures further financing
- ^ Airborne Wind Energy Conference 2010
- ^ http://www.energykitesystems.net/NDA___TetheredAviation/TheGermyAward.html In 2009: Dave Lang, Dave Culp, and Dave Santos. In 2010: Joe Faust.
- ^ Correspondence between NASA, Kitelab, and UpperWindpower editor, November 25, 2010. All AWE stakeholders have been invited to help draft the CONOPS.
- ^ Market Status Report on High Altitude Wind Energy, Version August 2011, GL Garrad Hassan
External links
{kind=link}
{kind=link}